GNSS 기술 개요
GNSS(Global Navigation Satellite System)은 전 지구 위성 항법시스템으로서 우주 공간에 위치한 위성으로부터 신호 정보를 기반으로 지상 수신기 위치의 3차원 위치 정보를 얻을 수 있는 장비이다.
최근까지 미국의 위성항법시스템인 GPS(Global Positioning System)라고 불리고 있으나 러시아 (GLONASS), 유럽(Europe), 중국(Beidou) 등에서 자체 시스템을 구축함에 따라 이제는 ‘GNSS’라는 표현을 사용해야 한다. GNSS는 지금까지는 측량용 정밀 측위, 정밀 항법, 레저용으로 활용되어 왔다.
최근에는 자율주행 및 C-ITS 분야의 발전으로 인해 해당 분야에 대한 활용성이 높아지고 있다.
• 자율주행: 자동차, 드론 등의 자율주행 기술에는 GNSS의 정밀한 위치 정보가 필수적임
• C-ITS: 교통 관리 및 안전을 위해 차량 간 또는 차량과 도로 인프라 간 통신에 GNSS 위치 정보가 활용됨
GNSS는 3개 부문으로 구분되는데 위성이 포함된 우주 부문, 지상관제 부문, 사용자 부문이다. 대부분의 GNSS 제품은 사용자 부문에 해당하며 수신기가 대표적이다. 본 기고에서는 GNSS 수신기에 대한 기술 및 관련 표준에 대해 기술하였다.
GNSS 수신기의 구조 및 개발 동향
GNSS 수신기 기술개발은 반도체 산업 등 타분야 산업의 발전을 통해 더욱 가속화되고 있다. 최근 수신기의 개발 동향은 더 많은 채널 수를 지원하기 위한 처리 능력이 향상되고, 다양한 기술과 융합을 통해 저비용 고성능 수신기를 개발하고 있다.
2-1. GNSS 수신기의 구조
GNSS 수신기의 일반적인 구조는 아래와 같다.
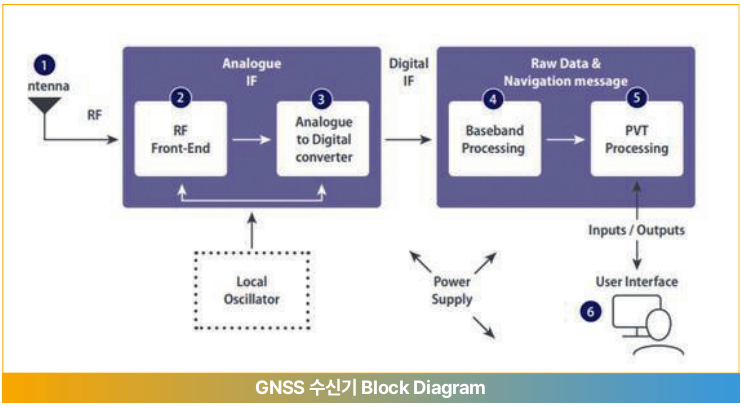
① Antenna(+preamplifier): GNSS 신호의 수신, 증폭 및 대역통과 필터링
② RF down converter: RF 신호를 하향 변환하고, 아날로그-디지털 변환기(ADC)의 허용 입력과 호환 되는 중간 주파수(IF)로 필터링
③ Analogue to Digital converter: 아날로그 중간 주파수(IF) 신호를 디지털로 변환
④ Baseband processing: 입력 신호를 획득 및 추적하고, 내비게이션 데이터를 복조
⑤ PVT(&Application) processing: 측정치와 항법 메시지를 기반으로 사용자의 위치, 속도, 시각 정보 산출
⑥ Input/Output interfaces: 내부 형식으로 생성된 데이터를 NMEA 포맷으로 변환 후 데이터는 RS-232, 이더넷, 블루투스 등의 데이터 인터페이스를 통해 출력
2-2. 고정밀 GNSS 수신기를 위한 주요 성능 지표
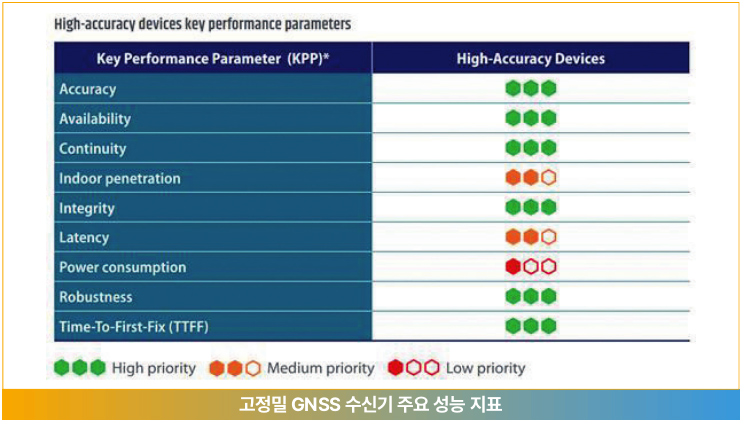
그동안 GNSS 시장은 정밀 측위용과 항법용으로 구분되어 왔다. 항법용의 경우 비교적 저렴한 수신기를 활용하며 낮은 정확도를 요구하였다. 하지만 최근 자율주행 및 C-ITS, 스마트시티, 드론 등 4차 산업혁명 시대의 기술적 요구사항에 따라 항법 분야에서도 정교한 GNSS 위치 결정 기술이 요구되고 있어, 이에 대한 기술 개발이 활발히 진행되고 있다. 다음은 고정밀 GNSS 수신기에 대한 주요 성능 지표이다.
① 정확도(Accracy): 정확도는 참값과 계산된 해답(위치나 시간) 사이의 차이를 의미한다. 이는 측정된 경우 표본의 지정된 비율(일반적으로 95%)이 포함될 값으로 표현한다. 다중 위성군과 다중 주파수 수신기를 배치하고 실시간 기하학적(RTK), 정밀 지점 위치 결정(PPP), 위성 기반 보강 서비스(SBAS) 등의 조합을 통해 달성할 수 있다.
② 가용성(Availability): 가용성은 사용자가 커버리지 영역에서 위치, 네비게이션 또는 타이밍 솔루션을 계산할 수 있는 시간의 백분율이다. 값은 특정 응용 프로그램과 사용되는 서비스에 따라 크게 다르다.
③ 연속성(Continuity): 연속성은 시스템이 의도된 작업에 대해 중단 없이 기능(필요한 성능 수준의 PNT 서비스 제공)을 수행할 수 있는 능력이다. 보통 연속성 위험으로 표현되며, 이는 완전히 응용 프로 그램의 시간 프레임에 따라 달라진다. 시스템이 사용 중인 절차 동안 일반적인 값은 약 1*10^-4이다.
④ 실내 침투력(Indoor Penetration): 실내 침투력은 신호가 건물 내부(예: 창문을 통해)로 침투하는 능력을 의미한다. 실내 침투력은 일반적으로 표현하는 표준 방법이 없다. GNSS에서 이러한 매개 변수는 수신기의 감도에 의해 결정된다.
⑤ 무결성(Integrity): 무결성은 시스템이 사용되어서는 안 될 때 사용자에게 경고를 제공할 수 있는 시스템의 능력을 표현하는 용어이다. 이는 사용자가 적절한 경고 없이 경보 한계를 초과하는 오류에 노출될 확률이다. 무결성이 보장되고 평가되는 방식, 그리고 사용자에게 무결성 관련 정보를 전달하는 수단은 응용 프로그램에 크게 의존한다.
⑥ 지연 시간(Latency): 지연 시간은 솔루션의 참조 시간과 이 솔루션이 최종 사용자 또는 응용 프로그램에 제공되는 시간 사이의 차이이다. 지연 시간은 일반적으로 수신기에서 계산되지만, 여러 위치 결정 솔루션의 통합(융합) 또는 고동력 모바일 장치에 대한 잠재적인 문제를 제시한다.
⑦ 전력 소비량(Power consumption): 전력 소비량은 장치가 위치를 제공하기 위해 사용하는 전력의 양이다. 이는 사용 가능한 신호와 데이터에 따라 달라진다. 예를 들어, GNSS 칩은 신호를 식별하기 위해 위치를 계산할 때보다 스캔할 때(콜드 스타트) 더 많은 전력을 사용하며, 일반적인 값은 수십 밀리와트(스마트폰 칩셋의 경우) 정도이다.
⑧ 강건성(Robustness): 강건성은 스푸핑과 방해에 관련되어 있으며 시스템이 이러한 문제를 어떻게 처리할 수 있는지를 나타낸다. 이는 정량적인 파라미터보다는 정성적인 파라미터이며, 수신기가 완화할수 있는 공격이나 간섭의 유형에 따라 달라진다. 강건성은 인증 정보와 서비스를 통해 향상될 수 있다.
⑨ TTFF(Time To First Fix): TTFF는 수신기의 활성화와 솔루션의 사용 가능성 사이에 측정된 시간 이다. 이는 자체 테스트를 켜는 것, 위성 신호와 탐색 데이터 획득, 그리고 솔루션의 계산을 포함한다. 주로 수신기가 활성화 이전에 접근할 수 있는 데이터에 따라 결정된다.
2-3. GNSS 수신기 기술 개발 동향
GNSS 수신기의 기술 개발 동향은 크게 정확도 향상, 안정성 및 신뢰성 향상, 활용성 향상 측면에서 볼 수 있다.
2-3-1. 정확도 향상
GNSS의 가장 중요한 요소인 정확도 향상 측면을 위해 현재 대부분의 GNSS 수신기는 Multi GNSS를 지원하고 있으며, RTK와 같은 보정정보 수신을 통해 정확도를 높이고 있다. 최근에는 IMU 기술을 탑재한 센서 모듈을 출시하여 GNSS 음영 지역에서 정확도를 높이고 있다.
2-3-2. 안정성 및 신뢰성 향상
GNSS의 경우 SA가 해제된 이후 정확도가 크게 향상되었다. 하지만 고의로 정확도를 저하시키기 위한 재밍(jamming) 또는 스푸핑(spoofing)의 위협에 노출될 수 있어, 이러한 위험을 감지하고 완화하는 기능을 갖추고 있다.
2-3-3. 활용성 향상
다양한 모빌리티 장비에서 GNSS 활용 극대화를 위해서는 모빌리티의 방향 정보를 취득해야 한다. 이를 위해서는 2개의 GNSS 안테나로부터 정보를 수집하여 계산해야 하고, 이와 같은 기술적 수요를 지원하기 위해 최근에는 듀얼 안테나를 지원할 수 있는 수신기가 개발 중이다. 또한, 다양한 기기와 연계를 위한 다양한 통신 모듈을 지원하고 있다.
GNSS 수신기 표준화 기구 및 표준화 동향
GNSS 수신기 관련 표준은 해양전자협회, 국제전기기술위원회, 미국무선통신기술위원회, 미국자동차 공학회 등에서 추진하고 있으며, GNSS 데이터 표준, 장비 표준, 보정서비스 표준 등 다양한 영역이 있다.
3-1. 해양전자협회(National Marine Electronics Association, NMEA)
해양 전자기술 및 선박항해 전자장비 등 해양 관련에 기반하는 멤버들로 구성된 미국의 비영리단체이다.
위치 관련 데이터통신 프로토콜의 표준으로 잘 알려진 NMEA-0183의 제정 및 해양장비 및 선박항해등 네트워크 표준 스펙을 인증하는 단체이다. NMEA-0183은 시간, 위치, 방위 등의 정보를 전송하기 위한 규격으로 주로 해양에서 사용하는 장비들 간 통신을 위한 전기적 인터페이스 및 데이터 프로토콜이며, GNSS 수신기도 이 표준을 사용한다.
NMEA-0183은 세 가지 레이어로 구성되어 있으며 각각 물리 계층, 데이터링크 계층, 애플리케이션 계층이다. 물리 계층은 RS-232, RS-422 등 전기적인 전송 규격을 뜻한다. 데이터링크 계층은 Baud rate, Data bit, Parity bit, Stop bit 등을 정해 놓는다. Application Layer는 데이터를 전송하는 Sentence에 대한 규약이다.
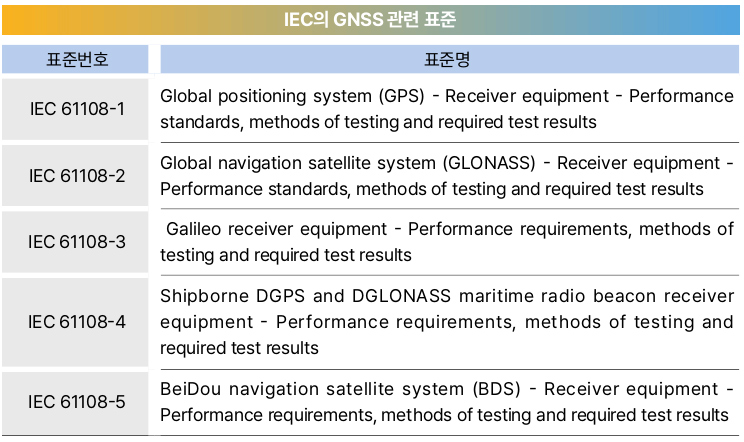
3-2. 국제전기기술위원회(International Electrotechnical Commission)
전기, 전자, 통신, 원자력 등의 분야에서 각국의 규격 및 표준을 조정하는 국제기관이다. GNSS 수신기는 IEC 61108(Maritime navigation and radiocommunication equipment and systems - Global navigation satellite systems (GNSS)) 시리즈에서 다루어지며, GNSS 수신기 및 관련된 장비의 최소 성능 표준을 설정한다.
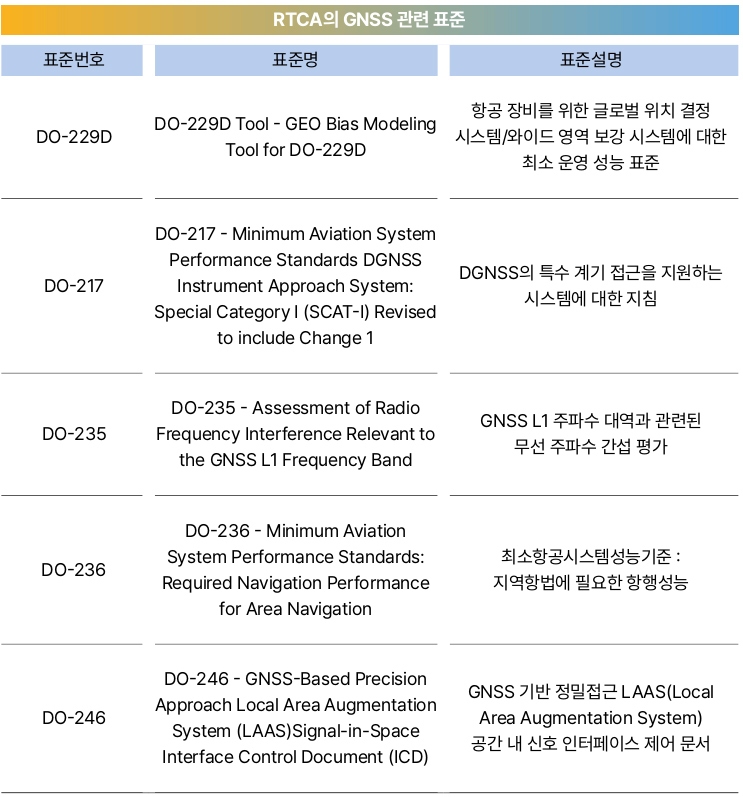
3-3. 미국무선통신기술위원회(RTCA; Radio Technical Commission for Aeronautics)
미국의 항공 관련 표준 개발 기구로, GNSS(위성항법시스템)에 대한 여러 표준을 제공하고 있다.
이러한 표준은 전 세계 항공 규제 기관에서 널리 인정받고 있다. RTCA의 GNSS 관련 표준 중 하나는 ‘Minimum Operational Performance Standards(MOPS) for Global Positioning System/Wide Area Augmentation System(GPS/WAAS)’이다. 이는 RTCA DO-229 문서로, WAAS(Wide Area Augmentation System)로 보강된 GPS에 대한 운용성능의 최소 기준을 제시한다.

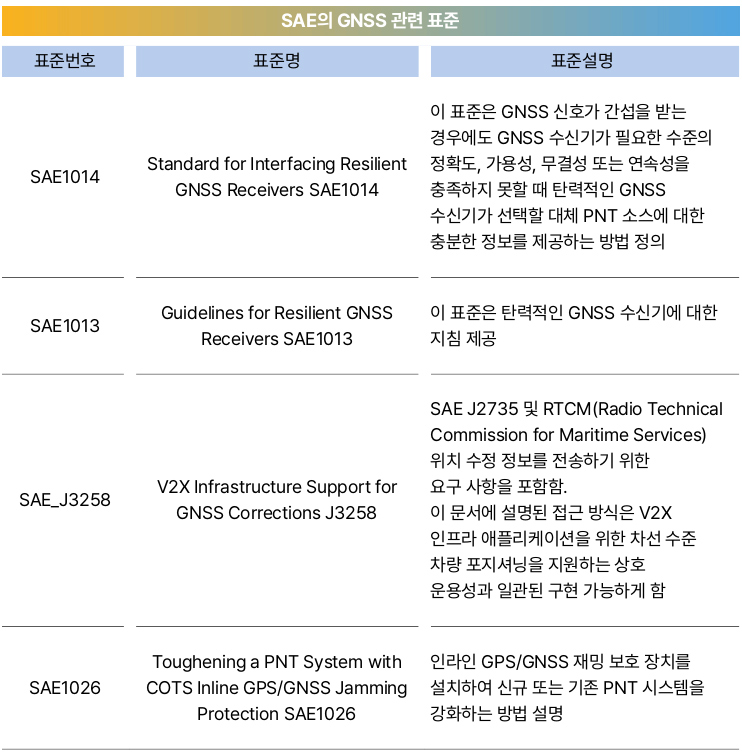
3-4. 미국 자동차 공학회(SAE; Society of Automotive Engineers)
SAE는 자동차 및 항공기 설계 및 제조의 기술 표준을 개발하는 미국의 전문가 그룹으로 최근에는 자율주행 차량 분야에 표준을 개발하고 있으며, 자동차에 적용하기 위한 GNSS 관련 표준을 개발하고 있다.
표준 트렌드 향후 전망
GNSS는 기술 발전 및 시장의 수요 증대로 인해 끊임없이 발전하고 있다. 지금까지 개발된 표준을 살펴 보면, 데이터 전송을 위한 프로토콜이나 수신기 사양, 보정 정보 서비스에 대한 표준화를 추진하고 있다.
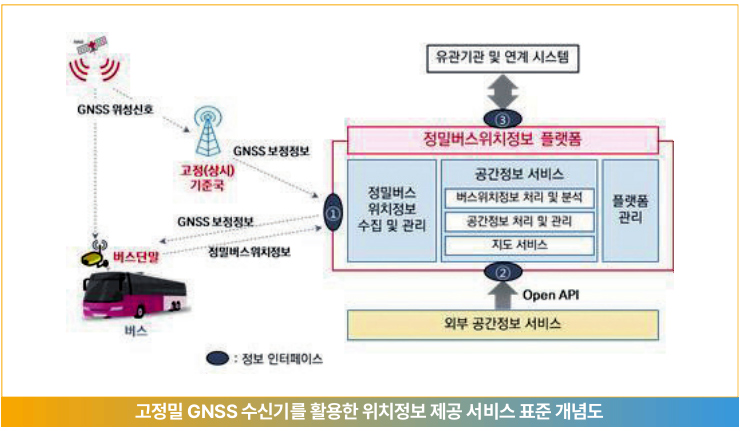
앞으로 GNSS의 경우 지금까지 주로 활용되던 분야 외에 스마트시티, 모빌리티 분야에서 활용성이 더욱 높아질 것으로 예상된다. 국내의 경우 초정밀 버스정보 서비스를 위한 고정밀 수신기와 플랫폼과의 표준 인터페이스 개발 등에 대한 논의가 진행되고 있으며, 향후 더욱 다양한 분야에 적용하기 위한 표준이 개발될 것으로 보인다.
이와 같은 시장의 요구사항을 반영하기 위해서는 호환성, 안정성, 데이터 신뢰성 및 타분야와의 연계 활용 측면이 매우 중요한 요소가 될 것으로 보이기 때문에 이에 대한 표준 개발이 지속적으로 이뤄어져야 할 것이다.